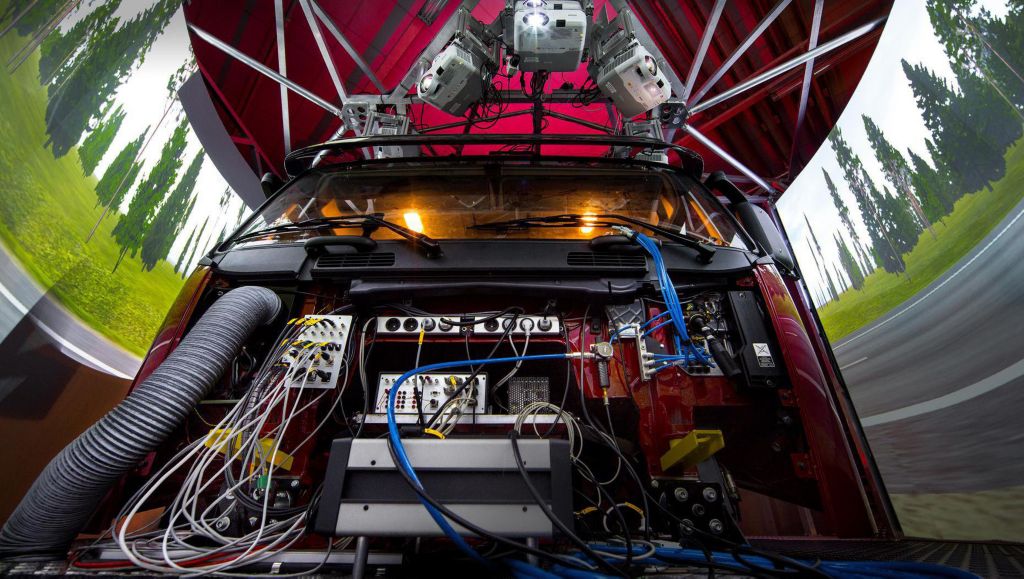
Ta istub operaatoriruumis, kus hulk arvuteid registreerivad katsesõitjate sõidustiili ning seda, kuidas nad tähelepanu jaotavad ja sõiduteel paiknevad. Kogutakse tohutud kogused infot. Sõidusimulaator põhineb suhteliselt uudsel katsetamistehnoloogial ning selle peamiseks eeliseks on see, et nüüd saab juhi kaasata juba uute toodete väljatöötamise varasesse etappi.
„Varem tuli kõik esmalt valmis ehitada – teed, sõidukid ja ohutussüsteemid, et enne katsete läbiviimist näha, kas see praktikas toimib. Nüüd on seda võimalik teha paralleelselt,” selgitab Kristoffer Tagesson.
Ehk teiste sõnadega öeldes, sõidusimulaator võimaldab katsetada uusi sõidukeid tuleviku sõidutingimustes ja teha seda praegu. Peter Nilsson, kes on samuti Volvo Trucksis töötav tööstuse eriala doktoriõppe üliõpilane, täpselt sellist tüüpi projektiga tegelebki.
„Töö, mis tuleb teha sõiduki juures ja infrastruktuuri arendamisel, põhineb pikaajalisel perspektiivil. Simulaatoriga, mis suudab jäljendada põhimõtteliselt kõiki sõidutingimusi, saame optimeerida neid tootearendusi koos,” räägib ta.
Peter Nilssoni projekti nimetatakse „Ohutud sõidukoridorid” ning see uurib viise, kuidas leida ohutuid sõidukoridore autorongidele pikkusega 27–34 meetrit.
„Ma olen kindel, et aastateks 2020–2030 on meil pikad autorongid juba teedel, sest need on loodushoidlikult tõhus alternatiiv. Selleks ajaks peame siiski leidma viisi, kuidas veokijuhil juhtimist hõlbustada, sest haagise täpse asendi teadmine on tõeline väljakutse,” selgitab Peter Nilsson.