Sõidusimulaator – virtuaalne tulevikuveok
2014-08-01
Üht maailma moodsamat sõidusimulaatorit kasutades püsib Volvo Trucks alati ohutusuuringute eesliinil.
Veokid
Veok lõpetab parempöörde ja jätkab eesoleval sirgel teelõigul kiirust kogudes sõitu. Mootori pöörete arv suureneb ja puud vilksatavad kabiiniakendest mööda. Veoki keres on selgesti tunda teepinna ebatasasustest põhjustatud vibratsiooni. Kõiges selles pole midagi üllatavat – välja arvatud asjaolu, et kõike, mida on kuulda, tunda ja näha, simuleeritakse arvutiga!
„Sõidusimulaatori põhiidee seisneb reaalsuse illusiooni loomises. See peaks tekitama täpselt sellise müra ja tunde nagu tavalisel maateel veokit juhtides,” räägib Volvo Trucksis töötav tööstuse eriala doktoriõppe üliõpilane Kristoffer Tagesson.
Rootsi riikliku teede ja transpordi uurimisinstituudi (VTI) sõidusimulaatorit, peetakse üheks kõige täiuslikumaks maailmas. Läbiviidav uuring on mõeldud praeguste ja tulevaste veokite turvalisuse suurendamiseks. Volvo Trucks on üks paljudest transpordisektoris tegutsevatest partneritest, kes viivad läbi uuringut simulaatoril eesmärgiga luua maailma kõige ohutumad veokid.
Kokkupõrkekatsed on esmaklassilised – neid on jahmatav vaadata ja need on ka üks efektiivsemaid viise veoki suutlikkuse katsetamiseks kokkupõrkel, kuid liiklusohutus on midagi hoopis enamat kui ainult purustatud aknad ja esiklaasid ning mõlkis plekk.
„Kokkupõrkekatses näeme, mis juhtub tegelikul löögimomendil, kuid mis juhtub enne seda? Kuidas me saame teada, et aktiivse ohutuse süsteemid juhti kriitilises olukorras ei häiri, vaid tõesti aitavad teda? Sellist laadi küsimusi me siin uurimegi,” selgitab Kristoffer Tagesson.
Sõidusimulaatori põhiidee seisneb reaalsuse illusiooni loomises. See peaks tekitama täpselt sellise müra ja tunde nagu tekib tavalisel maateel veokit juhtides.
Ta istub operaatoriruumis, kus hulk arvuteid registreerivad katsesõitjate sõidustiili ning seda, kuidas nad tähelepanu jaotavad ja sõiduteel paiknevad. Kogutakse tohutud kogused infot. Sõidusimulaator põhineb suhteliselt uudsel katsetamistehnoloogial ning selle peamiseks eeliseks on see, et nüüd saab juhi kaasata juba uute toodete väljatöötamise varasesse etappi.
„Varem tuli kõik esmalt valmis ehitada – teed, sõidukid ja ohutussüsteemid, et enne katsete läbiviimist näha, kas see praktikas toimib. Nüüd on seda võimalik teha paralleelselt,” selgitab Kristoffer Tagesson.
Ehk teiste sõnadega öeldes, sõidusimulaator võimaldab katsetada uusi sõidukeid tuleviku sõidutingimustes ja teha seda praegu. Peter Nilsson, kes on samuti Volvo Trucksis töötav tööstuse eriala doktoriõppe üliõpilane, täpselt sellist tüüpi projektiga tegelebki.
„Töö, mis tuleb teha sõiduki juures ja infrastruktuuri arendamisel, põhineb pikaajalisel perspektiivil. Simulaatoriga, mis suudab jäljendada põhimõtteliselt kõiki sõidutingimusi, saame optimeerida neid tootearendusi koos,” räägib ta.
Peter Nilssoni projekti nimetatakse „Ohutud sõidukoridorid” ning see uurib viise, kuidas leida ohutuid sõidukoridore autorongidele pikkusega 27–34 meetrit.
„Ma olen kindel, et aastateks 2020–2030 on meil pikad autorongid juba teedel, sest need on loodushoidlikult tõhus alternatiiv. Selleks ajaks peame siiski leidma viisi, kuidas veokijuhil juhtimist hõlbustada, sest haagise täpse asendi teadmine on tõeline väljakutse,” selgitab Peter Nilsson.

Seega on tulevikus võimalik keeruka juhtimissüsteemi abil konkreetse sõiduki jaoks välja arvutada ohutu paiknemine teel, kasutades ümbritsevast teest, liiklusmärkidelt ja teistelt sõidukitelt saadud infot.
„Põhimõte on selles, et autonoomne süsteem sekkub ja võtab juhtimise juhilt üle juhul, kui näeb, et veok asub väljaspool „ohutut sõidukoridoriˮ. Meie ülesandeks on nüüd välja selgitada, kuidas sellist ülevõtmist tuleks teha, sest on oluline, et see toimuks juhi jaoks loomulikult.”
Hiljuti viidi sõidusimulaatoril läbi katse, milles 20 juhti katsetasid kahte erinevat autonoomset juhtimissüsteemi. Seejärel paluti neil subjektiivselt hinnata, milline süsteemidest oli parem. Kogenud juht teab paremini kui keegi teine, kuidas sõiduk peaks teel käituma, seetõttu lasi Peter Nilsson katsesõitjatel sõita ka pika autorongiga.
„Seejärel saime registreerida andmed ja objektiivselt analüüsida, kuidas kogenud juhid 30 meetri pikkuse veokiga keeruliste liiklusoludega teedel sõitsid. Tulevikus saame seda kasutada baasdokumentatsiooni osana ohutute sõidukoridoride väljatöötamisel ja autonoomse juhtimissüsteemi projekteerimisel.”
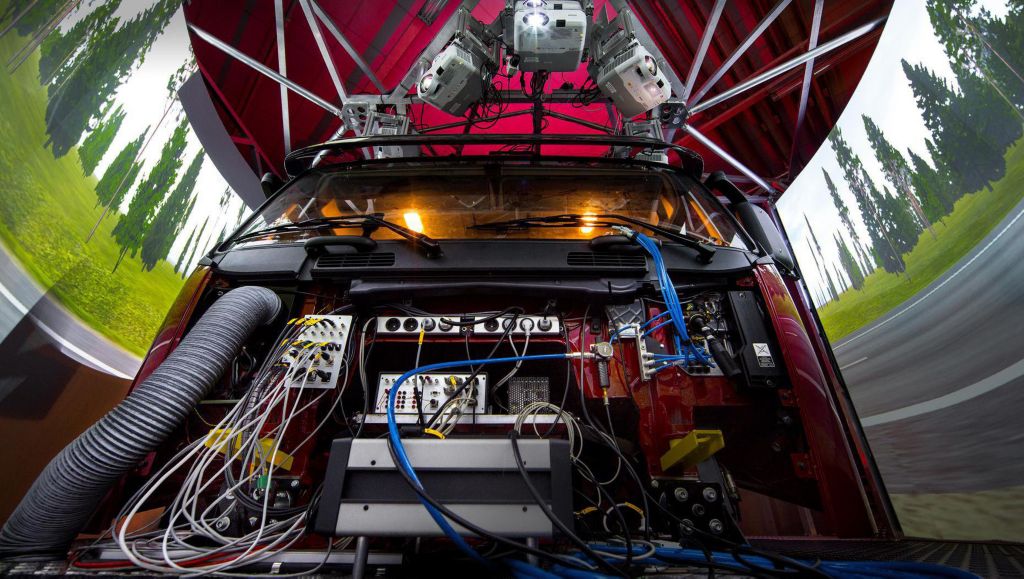
Läbiviidavad katsed on võimalikud tänu simulaatori kõrgetasemelisele tehnoloogiale. Simulaator paikneb kahel omavahel lõikuval rööpal, mis võimaldab simuleerida sõitmist edasisuunas ja tagurdamist, samuti pööramist. Veoki kabiini saab liigutada ka vertikaalselt. See tekitab realistliku sõidukogemuse, seda nii juhtimisfunktsioonide kui ka raami ja kere vibratsiooni osas.
Koostades üksikasjaliku pildi juhi tegelikust käitumisest, saame määratleda võimalusi meie enda ohutussüsteemi täiustamiseks.
Kabiin on varustatud ka kümne kaameraga, mis kõik registreerivad juhi tegevust. Viis kaamerat paiknevad nähtaval kohal juhi ees esiklaasil. Neis kasutatakse infrapunavalgust, et salvestada ja registreerida kõiki juhi silmaliigutusi. See võimaldab uurijatel täpselt näha, kus, millal ja kui sageli juht vaatab näiteks teele ning oma telefonile ja GPS-navigeerimisseadmele.
Viis kaamerat on kabiinis hästi ära peidetud, nii et juht nende asukohta ei tea. Need jälgivad teisi tüüpilisi juhi tegevusi, salvestades kõike, alates rooli käsitsemisest kuni gaasi ja teiste pedaalide jalaga liigutamiseni.
Teine põnev projekt, mida Volvo Trucksis praegu läbi viiakse, on suunatud juhi sõidustiili matemaatilise kirjelduse, ehk nn juhimudeli leidmisele. Seda hakatakse kasutama aktiivse ohutuse süsteemide hindamiseks.

Sõidusimulaatoris on katsetatud praegu juba turul saadavalolevaid süsteeme, näiteks avariipidurdusega kokkupõrkehoiatust. 46 juhti istusid üksteise järel simulaatorisse, teadmata, mis sõitmise ajal juhtuma hakkab. Pärast 30-minutilist sõitmist simuleeriti kriitilist olukorda ja rakendati ohutussüsteem.
„See võimaldab meil näha, kui kiiresti juht reageerib hoiatusele, kuidas ta tuleb toime koos süsteemiga ja ilma süsteemita ning kas esineb mingit erinevust nende inimeste reaktsioonides, kellel on süsteemiga juba mõningane kogemus. Koostades üksikasjaliku pildi juhi tegelikust toimimisviisist, saame määratleda võimalusi meie enda ohutussüsteemi täiustamiseks,” räägib projekti eest vastutav tööstuse eriala doktoriõppe üliõpilane Gustav Markkula.
„Uurijale on oluline võimalus kohtuda meie veokijuhtidega ja kuulata, mida nad tegelikult meie toodetest ja lahendustest mõtlevad. Ma arvan, et see on edu võtmeks.”